Robotics platform reborn
Today I took the first steps in reviving an old project, the robotic platform. This was a project I started towards the end of 2009, I abandoned it as soon as it reached the software stages and the fun construction parts had been done.
The aim of todays work was to confirm the robot still moved and find out what parts worked. The robot used a very versatile motor controller which accepted a variety of input signals, at the time I was controlling this over a serial interface but to simplify the testing I made use of the servo style pwm inputs.
I connected the motor controller to the outputs of a spare receiver for my quadrocopter remote and rigged up a pair of batteries, also from the quadrocopter, to provide almost 24v.

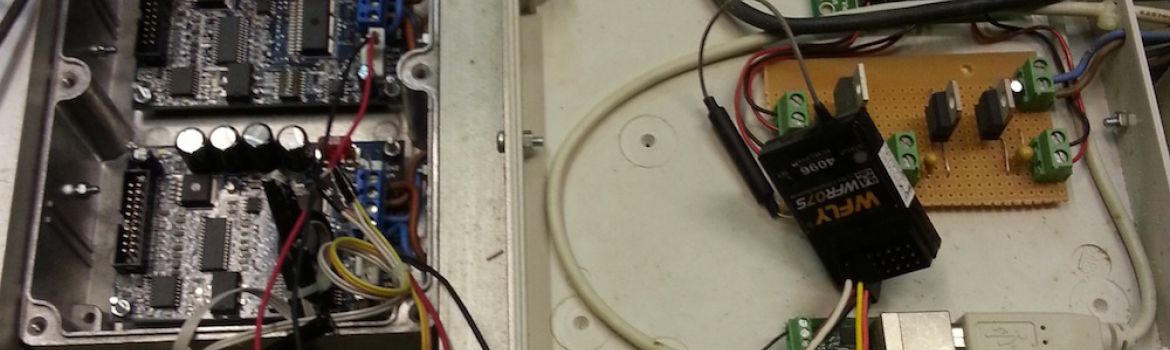
You can see in the image above the motor controllers on the left patched into the receiver on the right.
I was hopeful it would still work and thankfully it did, a little slower than I remember but that may be because of the slightly low battery voltage.
I am not going to be running this from an onboard computer anymore so I removed almost all of the electronics which were designed to connect via USB, I now have a bare platform with a pair of motor controllers that is still able to move around with a person standing on it!
You can just about see the robot moving around below